Introducción a Redes Neuronales y Aprendizaje Profundo en Ingeniería Mecánica
El campo de la ingeniería mecánica se ha beneficiado enormemente del avance de las tecnologías de inteligencia artificial, en particular de las redes neuronales y el aprendizaje profundo. En este blog, exploraremos los fundamentos de estas tecnologías y su aplicación en diversos aspectos de la ingeniería mecánica avanzada.
1. Fundamentos de Redes Neuronales y Aprendizaje Profundo
Definición y Conceptos Básicos
Las redes neuronales son modelos computacionales inspirados en el funcionamiento del cerebro humano. Están compuestas por neuronas artificiales que se organizan en capas y se conectan entre sí mediante pesos sinápticos. El aprendizaje profundo, por otro lado, se refiere al entrenamiento de redes neuronales con múltiples capas, lo que permite aprender representaciones complejas de los datos.
Breve Historia y Evolución
El concepto de redes neuronales se remonta a la década de 1940, pero su aplicación práctica se vio limitada por la capacidad computacional disponible en ese momento. Con el advenimiento de la era digital y el aumento del poder de procesamiento, el aprendizaje profundo ha experimentado un crecimiento exponencial en las últimas décadas.
Aplicaciones en Ingeniería Mecánica
Las redes neuronales y el aprendizaje profundo se utilizan en una amplia gama de aplicaciones en ingeniería mecánica, incluyendo análisis de imágenes, predicción de comportamientos y optimización de procesos.
2. Arquitecturas de Redes Neuronales
Perceptrón Multicapa

Redes Neuronales Convolucionales (CNN)

Las CNN son ampliamente utilizadas en tareas de procesamiento de imágenes en ingeniería mecánica. Su capacidad para aprender características jerárquicas de las imágenes las hace ideales para aplicaciones como inspección de componentes y detección de defectos.
Redes Neuronales Recurrentes (RNN) y LSTM
Las RNN son adecuadas para trabajar con datos secuenciales, como series temporales en ingeniería mecánica. Las LSTM (Memoria a Largo Plazo) son una variante de las RNN que pueden aprender dependencias a largo plazo en los datos, lo que las hace útiles para tareas como predicción y generación de secuencias.
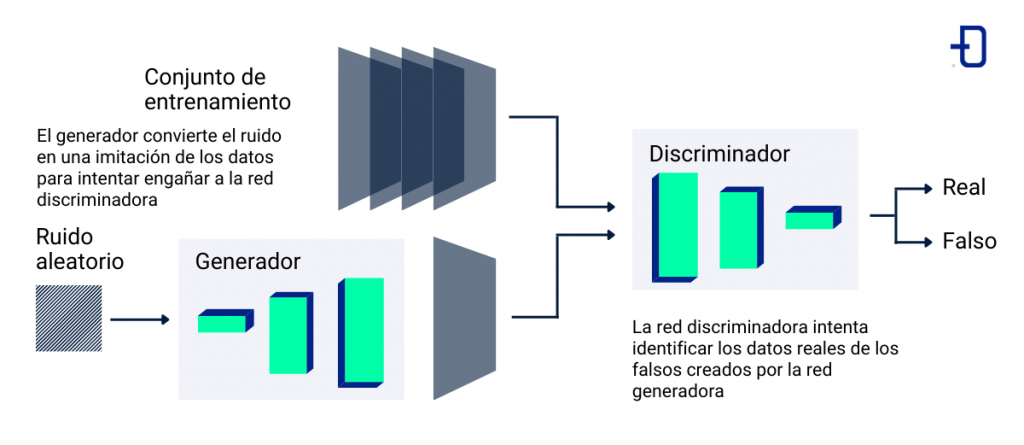
Redes Neuronales Generativas Adversarias (GAN)
3. Entrenamiento y Optimización
Preprocesamiento de Datos
El preprocesamiento de datos es una etapa crucial en el entrenamiento de redes neuronales. Incluye tareas como normalización, codificación de variables categóricas y división de datos en conjuntos de entrenamiento, validación y prueba.
Funciones de Activación y Capas Ocultas
Las funciones de activación son funciones matemáticas que determinan la salida de una neurona dada su entrada. Las capas ocultas de una red neuronal son aquellas que se encuentran entre la capa de entrada y la capa de salida y realizan transformaciones no lineales de los datos.
Funciones de Pérdida y Optimización
La función de pérdida cuantifica qué tan bien está funcionando el modelo en un conjunto de datos dado. Los algoritmos de optimización, como el descenso de gradiente estocástico, se utilizan para ajustar los pesos de la red neuronal de manera que se minimice la función de pérdida.
Regularización y Prevención del Sobreajuste
La regularización es una técnica utilizada para evitar el sobreajuste, que ocurre cuando el modelo se adapta demasiado bien a los datos de entrenamiento y no generaliza bien a datos nuevos. Métodos como la regularización L1/L2 y la técnica de abandono son comunes en el entrenamiento de redes neuronales.
4. Aplicaciones en Ingeniería Mecánica
Análisis de Imágenes y Visión Artificial
Las redes neuronales se utilizan para analizar imágenes en ingeniería mecánica, como en la inspección de componentes y la detección de defectos. Ejemplos incluyen la identificación de grietas en estructuras metálicas y la clasificación de piezas en un proceso de fabricación.
Predicción y Optimización de Procesos
El aprendizaje profundo se utiliza para predecir el comportamiento de sistemas mecánicos y optimizar procesos de fabricación. Por ejemplo, se pueden utilizar redes neuronales para predecir la vida útil de un componente o para optimizar los parámetros de un proceso de mecanizado.
Control de Sistemas y Mantenimiento Predictivo
Las redes neuronales se utilizan en el control de sistemas mecánicos para mejorar su rendimiento y eficiencia. Además, se pueden utilizar para el mantenimiento predictivo, identificando posibles fallos en los equipos antes de que ocurran.
5. Ejemplos Prácticos y Códigos en Google Colab
A continuación, se presentan ejemplos prácticos de implementación en Google Colab:
Implementación de una CNN para Detección de Defectos:
# Importar las bibliotecas necesarias import tensorflow as tf from tensorflow.keras.models import Sequential from tensorflow.keras.layers import Conv2D, MaxPooling2D, Flatten, Dense # Definir el modelo de la CNN model = Sequential([ Conv2D(32, (3, 3), activation='relu', input_shape=(64, 64, 3)), MaxPooling2D((2, 2)), Conv2D(64, (3, 3), activation='relu'), MaxPooling2D((2, 2)), Flatten(), Dense(64, activation='relu'), Dense(1, activation='sigmoid') ]) # Compilar el modelo model.compile(optimizer='adam', loss='binary_crossentropy', metrics=['accuracy']) # Entrenar el modelo con tus datos # X_train, y_train son tus datos de entrenamiento # model.fit(X_train, y_train, epochs=10, batch_size=32)
No hay comentarios.:
Publicar un comentario